
中国空间站机械臂有哪些黑科技?一问到底
··
12月27日凌晨0时55分,经过约6小时的出舱活动,神舟十三号航天员乘组圆满完成了第二次出舱全部既定任务,这也是空间站阶段航天员的第四次出舱。
此次航天员出舱,最重要的任务之一,就是进一步验证机械臂的相关设计。这个充满科技感的大家伙,就是目前我国自主研制智能程度最高、技术难度最大、系统最复杂的空间智能制造系统,机械臂。它既能像人的胳膊一样灵活转动,还能在空间站到处爬行。力气大,够灵活,颜值高,本领多,是航天员们出舱作业少不了的好帮手。
机械臂到底身长几何?体重多少?是如何爬行的?爬的速度有多快?在它身上还有哪些我们不了解的高科技?一问到底↓
机械臂主要承担哪些在轨任务?
专家告诉我们,作为目前同类航天产品中复杂程度与控制精度最高、规模最大的空间智能机械系统,机械臂主要承担着舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。
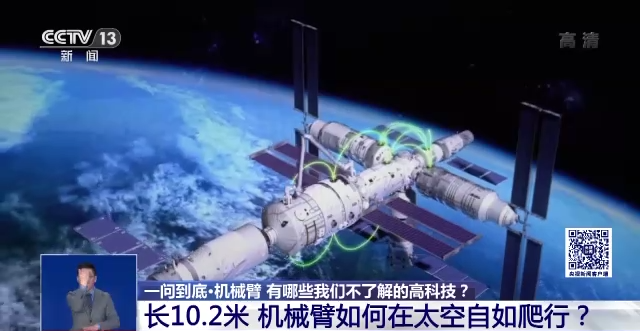
长10.2米 机械臂如何在太空自如爬行?
机械臂全长10.2米,为了扩大任务触及范围,它还具备“爬行”功能。在最近四次出舱任务当中,都充当了航天员专属交通工具的角色。大家可能很好奇,这么大的一个机械臂是如何在太空爬行的,它会不会掉下来呢?
由于机械臂采用了3个肩关节,1个肘关节和3个腕关节的配置方案,肩部和腕部关节配置相同,也就是说机械臂两端可以实现同样的活动功能。
航天科技集团五院空间站机械臂技术负责人胡成威介绍,机械臂在空间站进行爬行的过程,可以形象地看成是猴子在树林之间穿行,首先一只手抓住树枝做固定,另一只手松开,再抓住前方的另一个树枝,如此反复实现爬行。猴子的手就是安装在机械臂肩部与腕部的末端执行器,而树枝就是空间站舱体表面安装的目标适配器。当然,这个抓住和松开的过程非常复杂。
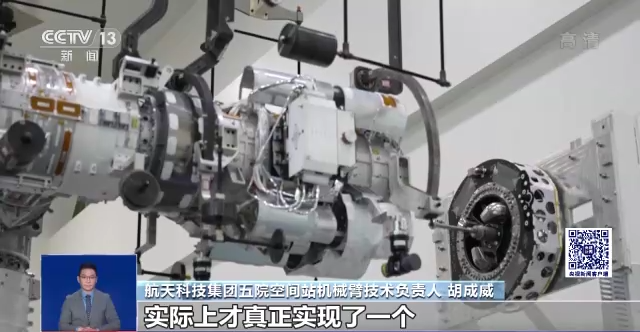
航天科技集团五院空间站机械臂技术负责人 胡成威:这里边有三根绳索,杆伸到孔里头,这样的话钢丝绳收拢的时候就捕获住了,捕获就是完成第一步。捕获住之后杆上有个球形的头,机械臂往回收的时候绳子要带着头,拉着两个对接面靠近,这叫拖动。那么拖动完成之后,还有最后一步就是锁紧,锁紧上面有4个像耳朵似的,就有4个机构,对准了之后,4个机构同步往后推,它们之间进行电连接和机械的锁紧,完成之后,实际上它实现了末端和目标之间的一个真正的捕获。
机械臂爬行有多快?“干活”有多准?
一个爬行动作看似简单,原来背后有如此复杂和精密的系统支撑。那么机械臂的爬行速度有多快?它能够精准爬行到指定位置?
央视记者 李宁:机械臂我们设计的速度是每秒钟600毫米,但为了安全需要,我们不需要它走那么快。目前的运行状态大概是每秒钟60—100毫米。

航天科技集团五院空间站机械臂技术负责人 胡成威:(每秒钟600毫米)对于空间这种结构来说,速度已经是非常快了。但是咱们在使用过程中,为了保证机械臂的安全,同时也要考虑到空间站的各种约束条件,就限定了一个它的使用速度,只用到了机械臂设计速度的六分之一。
走得慢才能走得稳,更能走得准。别看机械臂体格大,在空间站也能做细活,10米长的机械臂执行任务的精度可以达到毫米级。

航天科技集团五院空间站机械臂技术负责人 胡成威:在轨的话,专门有一段时间是进行多个点的测试,来验证机械臂从开环从a点到b点,从各个位置看最大误差是多少?(误差)指标是45毫米,现在(误差)能达到是15毫米。后面实际上像我们现在设计控制模式的时候,为了使机械臂的工作更加可靠,实际上它的误差已经控制在几毫米以内,相当于机械臂内部的受力会小得多。
机械臂有多重?力气有多大?
除了协助航天员出舱作业外,机械臂还要承担舱段转位、舱外货物搬运等很多体力活。俗话说,身大力不亏,那我们的机械臂到底有多重?力气有多大?
航天科技集团五院空间站机械臂技术负责人 胡成威:(机械臂重)738公斤,它这个重量应该说是集成度非常高,重量的话在国际上应该都属于比较领先的一个水平。
胡成威介绍,机械臂是一个高度集成的空间智能机械系统,包括本体系统和7个子系统,零部件数以万计,为了满足空间站产品轻量化的需求,他们费了很大的力气来给机械臂减重。

航天科技集团五院空间站机械臂技术负责人 胡成威:咱们看到的机械臂,实际上是这个团队研制的第7条机械臂。工程样机当时是980公斤,到了738公斤,实际上已经缩减了差不多200(公斤)。绝大部分产品是铝合金的,重要的产品里头还有一些是钛合金的,像有一些负载比较大的齿轮是采用新材料不锈钢,所有的参数都是重新来进行设计的。
胡成威介绍,机械臂减重后能力并没有减少,最大的负载能力可以达到25吨,完全能够满足任务需要。
航天科技集团五院空间站机械臂技术负责人 胡成威:机械臂对于空间站来说,相当于是一个大力士,可以满足覆盖空间站就是大中小各级载荷的相关任务要求。
未来机械臂将有哪些新任务?
无论重活儿还是细活儿,机械臂都不在话下。未来,随着我国空间站建设不断推进,机械臂还会有哪些新的任务?
航天科技集团五院机械臂任务规划主管设计师 辛鹏飞:后面会有很多的大型设备,通过货运飞船运送上天,机械臂需要完成把这些大型设备从货船里边抓取出来,然后再对接到一个正确的位置上这样一个安装的作业。另外机械臂还承担着巡天飞行器的捕获,也就是我们未来会有一艘太空的望远镜,伴飞在空间站的周围,机械臂具备在它需要照料的时候,把它抓取对接到核心舱上,完成对它的维修工作。
按照计划,明年我国还将发射梦天和问天两个实验舱,空间站的构型将变成T字形,随着空间站的面积增大,空间站机械臂的活动范围也将变大,它的形态也会随之改变。
航天科技集团五院空间站机械臂技术负责人 胡成威:等到明年的时候,两个实验舱发射之后,还有一个小型的5.5米长的机械臂,叫实验舱机械臂。这样两个机械臂又可以在轨组合成一个组合臂,它通过机联的方式组合成一个15米长的组合臂,那么后面的很多任务,就可以分别由大臂、小臂和组合臂的方式来进行,开展后续的工作。

 海报热榜
海报热榜
 相关推荐
相关推荐